
19.9.2014
Появилась веская причина поднять интересную и всегда актуальную тему — получение точного и стабильного опорного сигнала для узкополосной радиосвязи на высоких частотах. Предложенные ранее решения, например, от уважаемых G3RUH и I2PHD, были неоднократно успешно повторены и показали прекрасные результаты (точность установки частоты определялась мазером на GPS спутнике, а стабильность частоты (значение девиации Аллана) получалась 5*10E(-12) при тау = 10 сек, что соответствует 0.05 Гц на частоте несущей 10 ГГц). Однако было одно «но» — ориентация решения на использование специализированного GPS приемника Rockwell/Conexant/Navman Jupiter GPS, который уже давно снят с производства.
В августе с.г. в Yahoo конференции Softrock SDR появилась информация от Warren, 9V1TD о «Frequency agile GPS reference for less than $30». Информация была похожа на реализованную мечту многих поколений УКВистов — маленький (размером 35 х 25 мм) GPS приемник на модуле uBlox NEO-7M обеспечивал высочайшую точность и стабильность частоты выходного опорного сигнала. При этом стоимость платы составляла всего 22-26 USD на eBay. И что самое интересное — выходной опорный сигнал мог программно устанавливаться от 0.25Гц до 10 МГц (в отличие от упомянутого выше старого приемника Rockwell/Conexant/Navman Jupiter GPS, который имел выход опорного сигнала только на 10 кГц). В общем — фантастика!
Устоять было не возможно — заказ был размещен на eBay у продавца goodlucksell и получен в Москве уже через 10 дней.

Рис.1. Комплект поставки — плата приемника с модулем NEO-7M и активная антенна
Много полезного по теме можно почерпнуть ознакомившись со страницей Alan, G4ZFQ .
Для подключения приемника использовался стандартный конвертер интерфейсов USB <-> RS232 TTL на микросхеме SiLabs CP2102, который обеспечивает сигналы RXD и TXD с уровнями 3.3 В.
В связи с тем, что прикладываемая активная GPS антенна имела короткий кабель было решено заменить ее на другую обычную активную GPS антенну со стандартным усилением 24 дБ и питанием 3.3В (питание подается по центральной жиле антенного разъема).
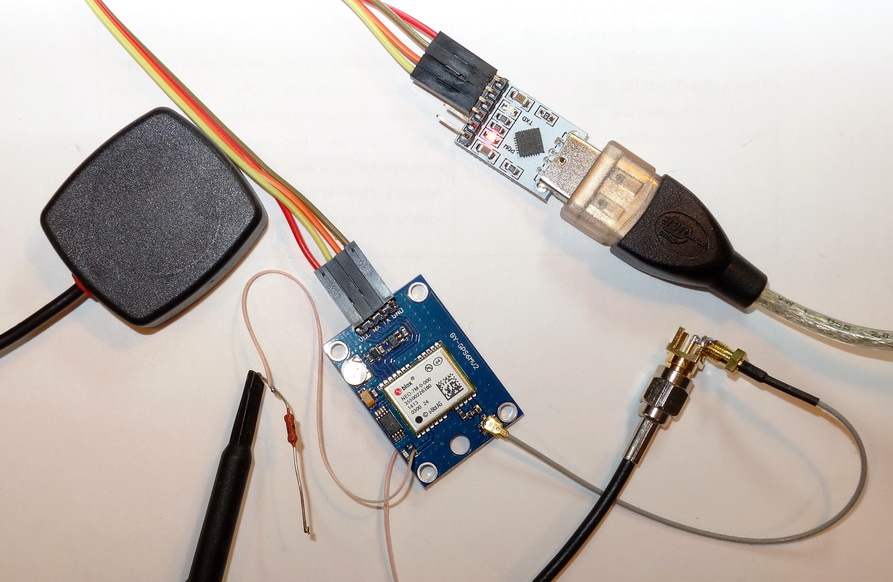
Рис.2. Активная безымянная GPS антенна, плата приемника NEO-7M, конвертер USB <-> RS232 TTL
Для конфигурации приемника используется ПО uBlox u-Center V8.11.
Устанавливаем драйвер конвертера USB<->RS232 TTL, определяем виртуальный COM порт для конвертера.
Запускаем программу u-center и конфигурируем GPS приемник:
- Receiver -> Port -> выбираем виртульный COM порт конвертера USB <-> RS232
- Receiver -> Baudrate -> 9600
- Receiver -> Generation -> u-blox 7
- Receiver -> Action -> Save config
Питание GPS приемника +5В также поступает от платы конвертера USB <-> RS232 и подается на встроенный LDO стабилизатор +3.3В.
Для получения выходного опорного сигнала следует подпаяться к контакту 3 — сигнал «Timepulse» модуля NEO-7M (см. схему ниже — TNX K9IVB).

Рис.3. Принципиальная схема GPS приемника на основе модуля NEO-7M
Теперь следует сконфигурировать частоту опорного сигнала в ПО u-Center:
View -> Configuration view -> TP5
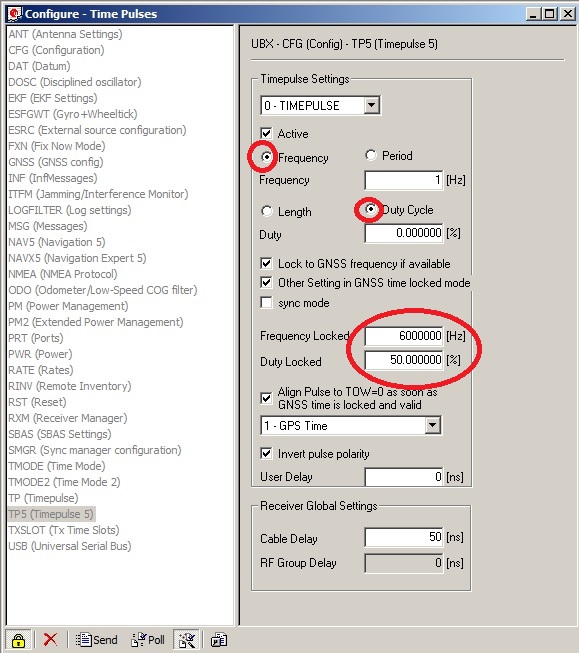
Рис.4. Окно конфигурации выходного опорного сигнала
Устанавливаем требуемую частоту, скважность в режиме захвата/сопровождения. Шаг перестройки частоты может быть 1 Гц, скважность желательно устанавливать 50% для минимизации уровня гармоник.
Итак, все готово для проведения испытаний. К выходу опорного сигнала подключаем анализатор спектра и осциллограф. И вот с этого момента радостная мысль о реализованной мечте многих поколений УКВистов постепенно начинает пригасать…
А дело в том, что на анализаторе спектра мы видим совершенно разные картины спектра выходного сигнала в зависимости от установленной частоты. В результате некоторого анализа мы мысленно делим выходные частоты опорного сигнала на два типа — «хорошие» и «плохие» частоты. При этом «плохих» частот существенно больше… Дальнейший анализ показывает, что к «хорошим» частотам относятся частоты, которые образуются от целочисленного деления частоты внутреннего тактового генератора частотой 48 МГц.
Итак, «хорошие» выходные частоты опорного генератора:
- 24.000 МГц
- 16.000 МГц
- 12.000 МГц
- 8.000 МГц
- 6.000 МГц
- 4.000 МГц
- 3.000 МГц
- 2.000 МГц
«Плохие» частоты — почти все остальные… 🙁
Проиллюстрируем это результатами измерений спектра выходного опорного сигнала.
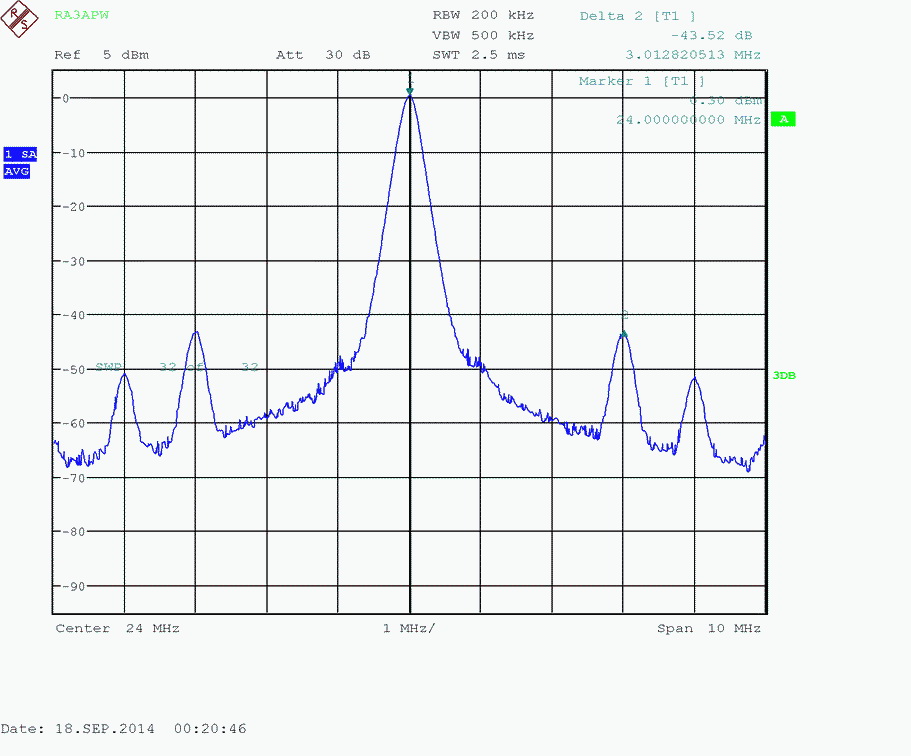
Рис.5. Спектр выходного опорного сигнала 24.000 МГц
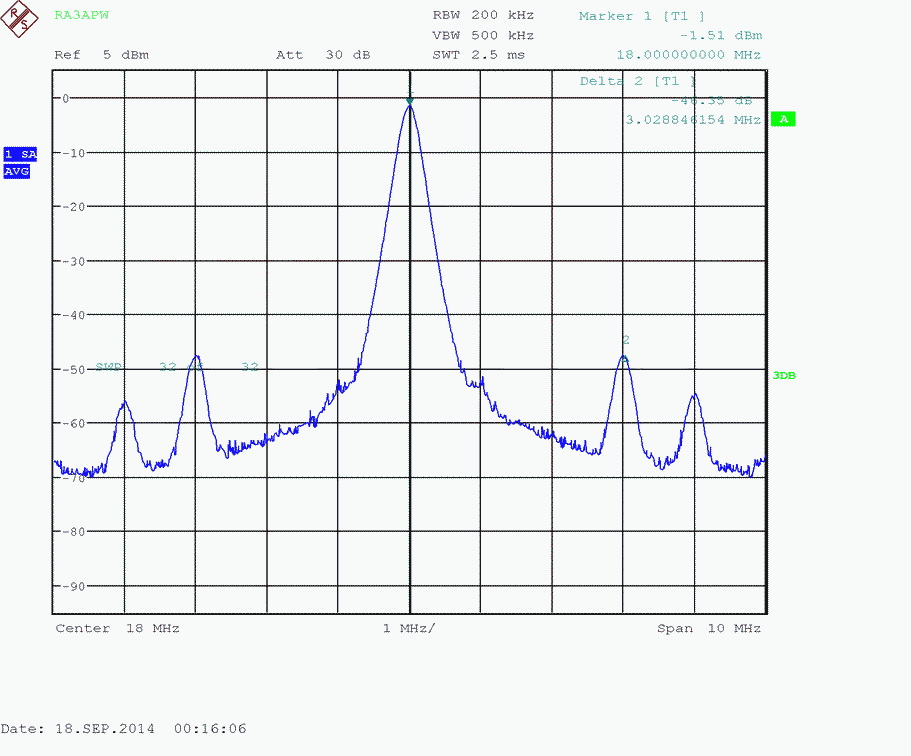
Рис.6. Спектр выходного опорного сигнала 18.000 МГц
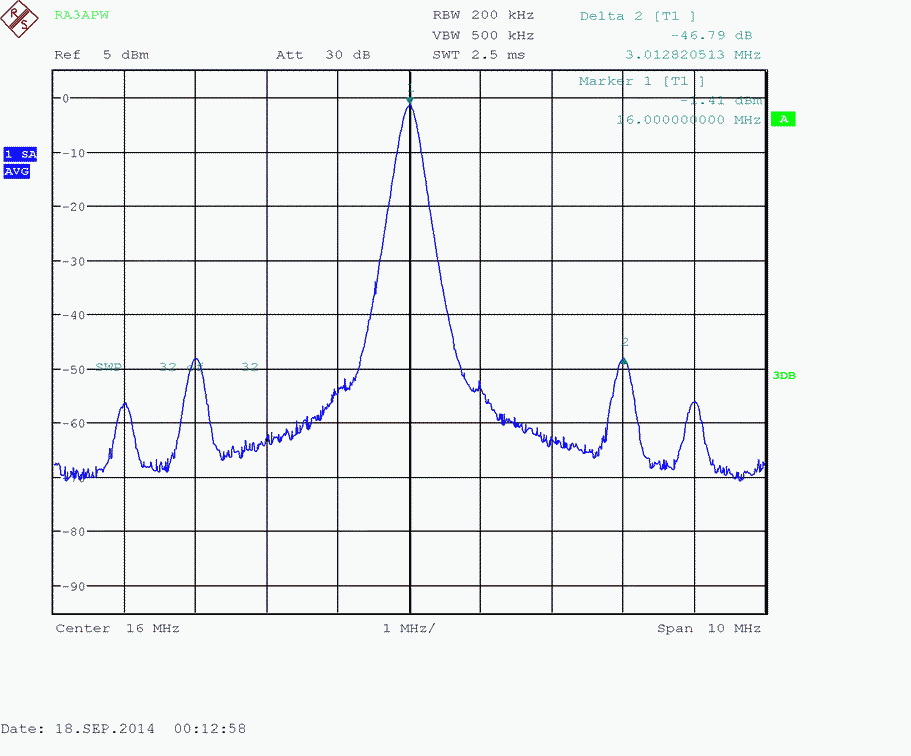
Рис.7. Спектр выходного опорного сигнала 16.000 МГц
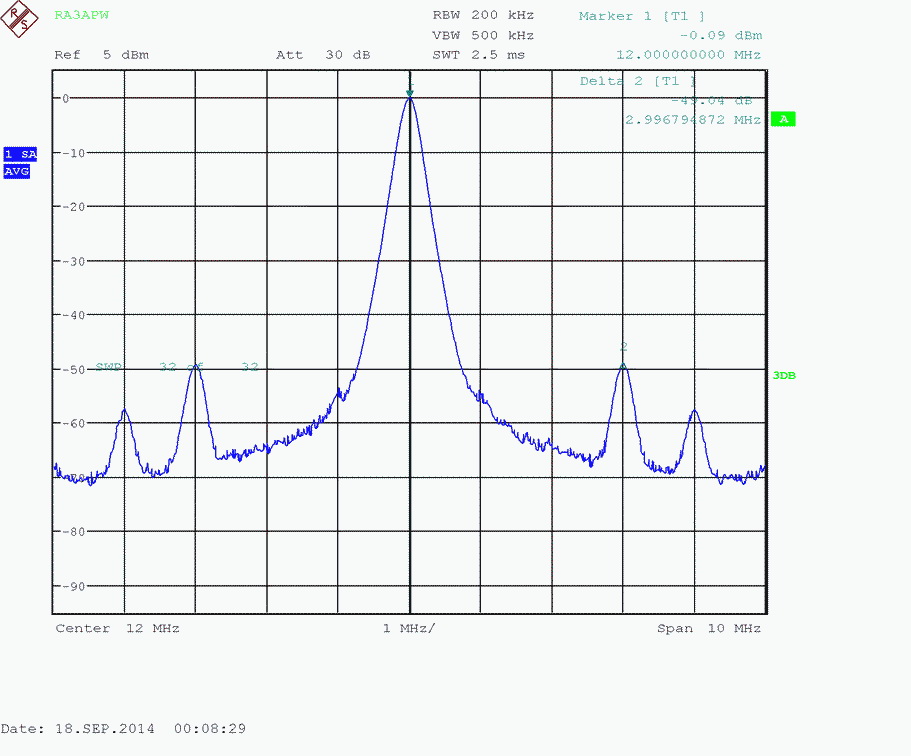
Рис.8. Спектр выходного опорного сигнала 12.000 МГц
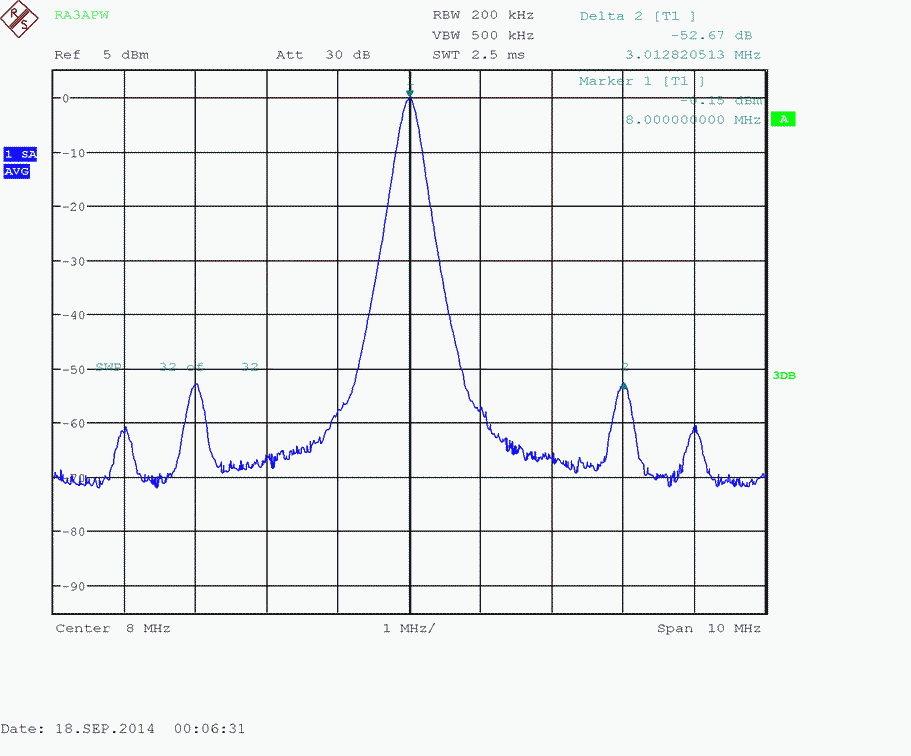
Рис.9. Спектр выходного опорного сигнала 8.000 МГц
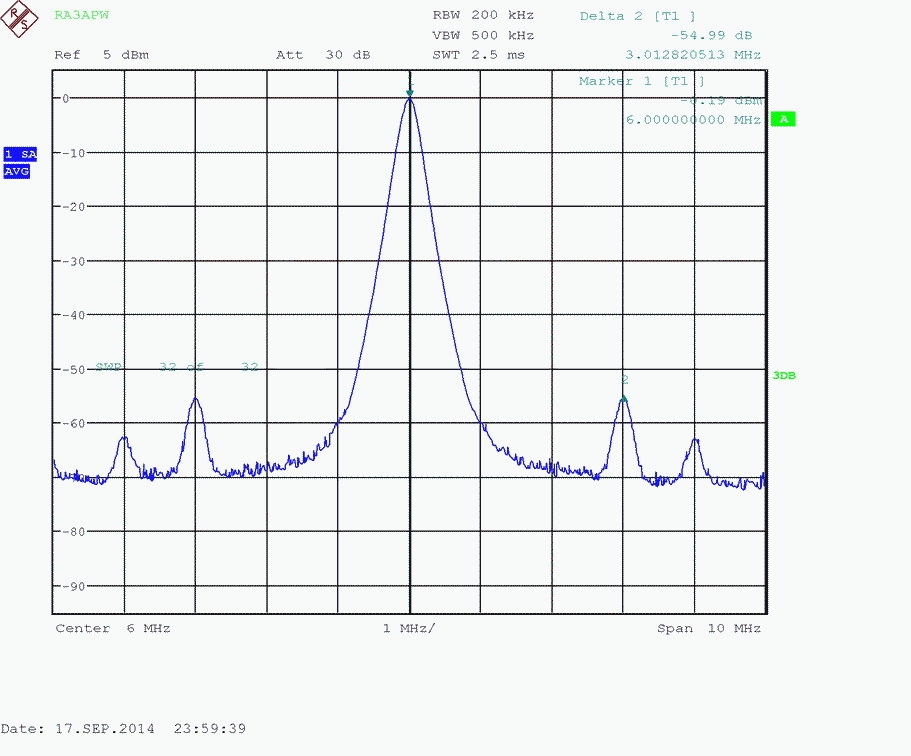
Рис.10. Спектр выходного опорного сигнала 6.000 МГц
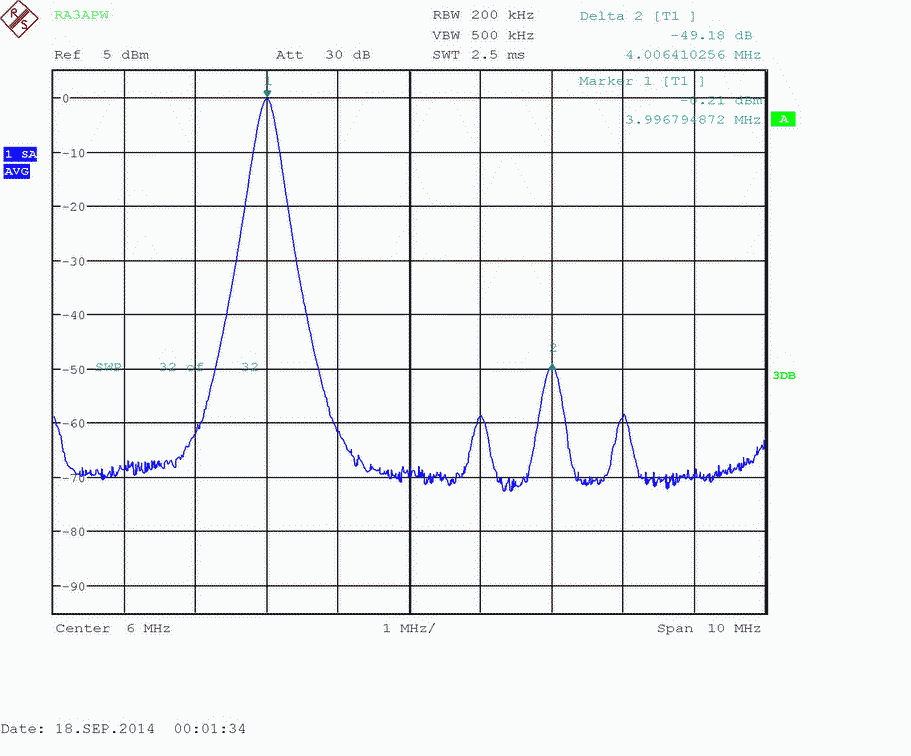
Рис.11. Спектр выходного опорного сигнала 4.000 МГц
Измеряем фазовый шум с расстройкой 10 кГц от несущей для «хороших» опорных частот
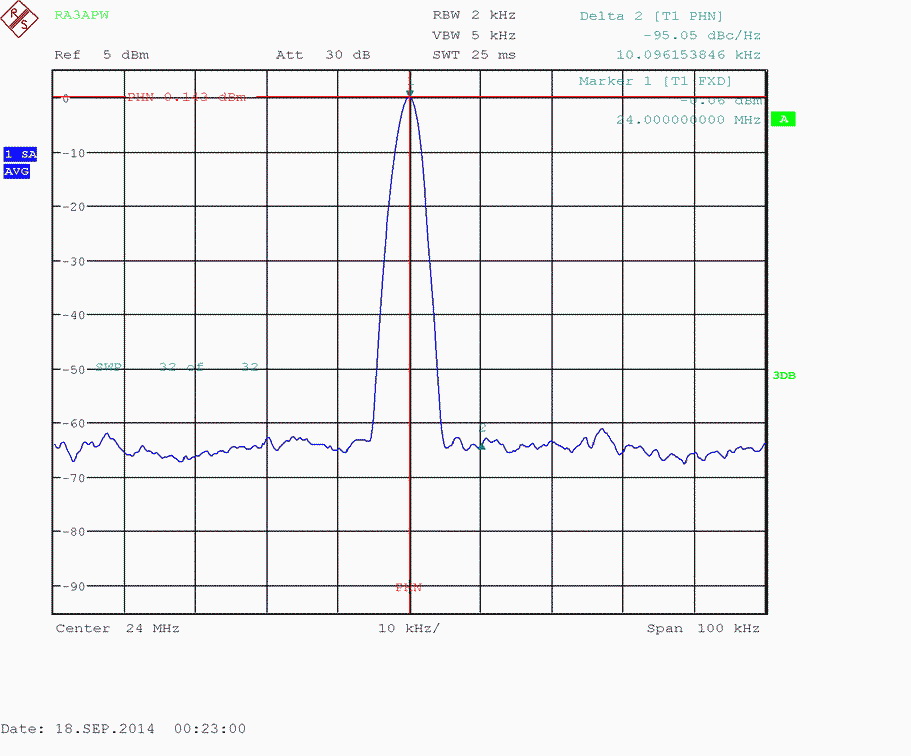
Рис. 12. Фазовый шум на «хорошей» частоте 24.000 МГц = -95 дБн/Гц @ 10 кГц
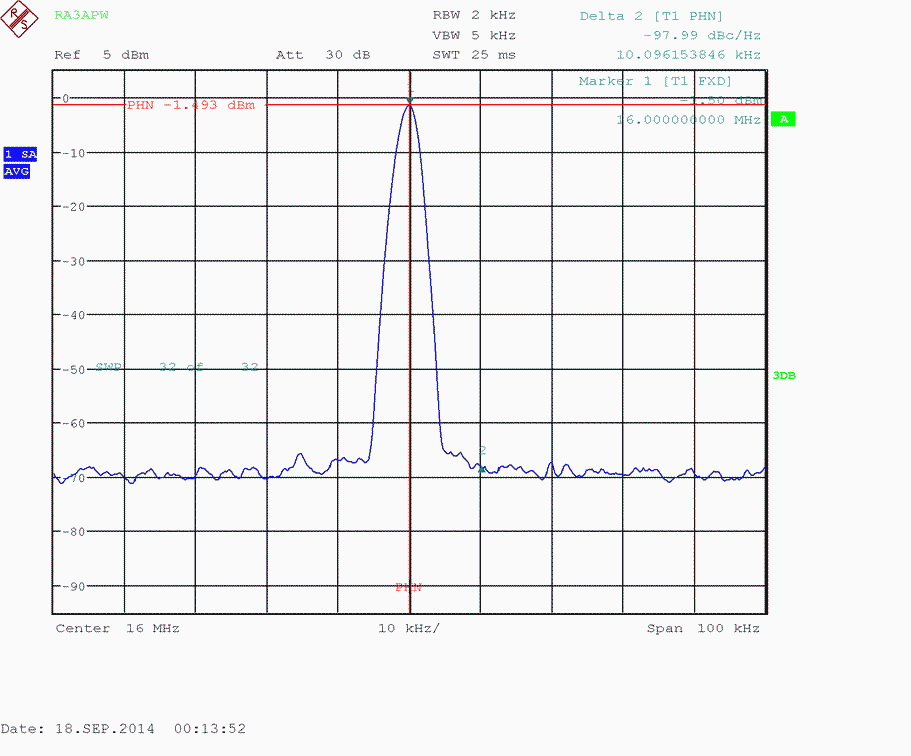
Рис. 13. Фазовый шум на «хорошей» частоте 16.000 МГц = -98 дБн/Гц @ 10 кГц
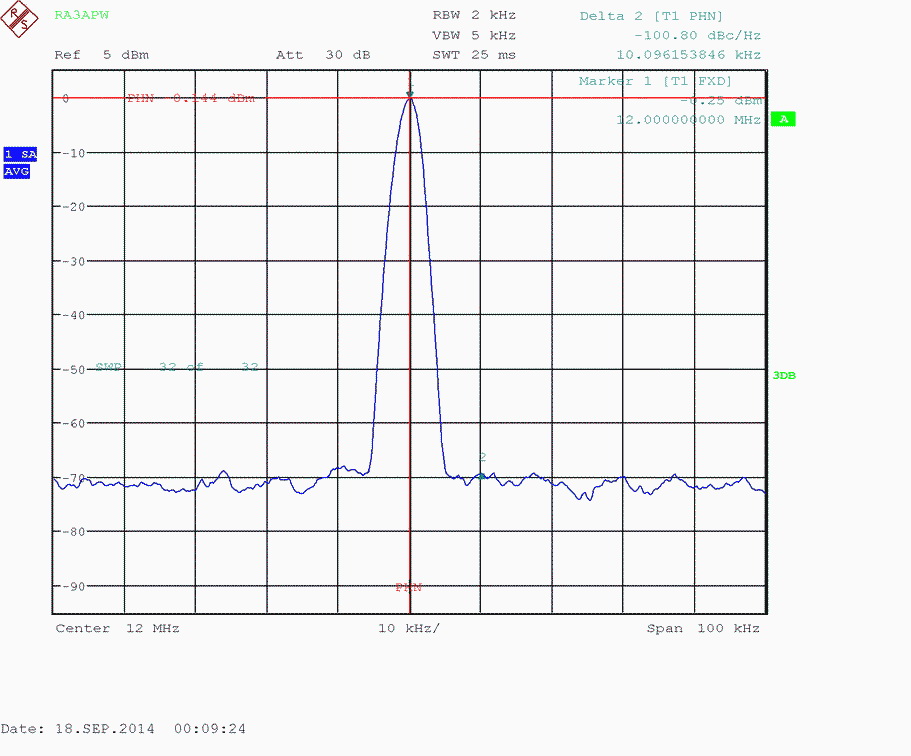
Рис. 14. Фазовый шум на «хорошей» частоте 12.000 МГц = -100 дБн/Гц @ 10 кГц
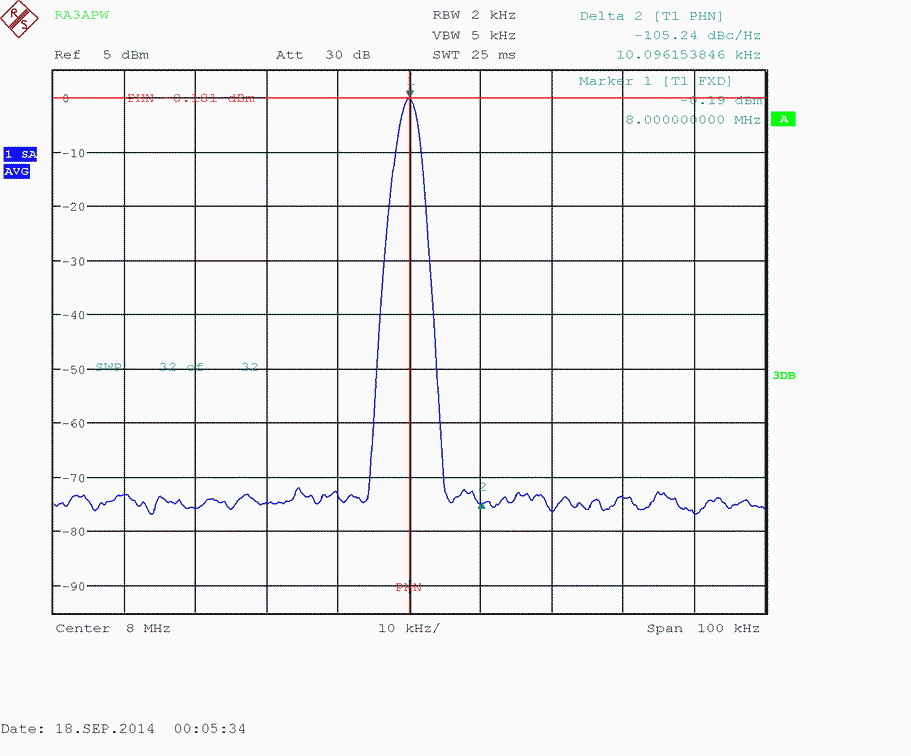
Рис. 15. Фазовый шум на «хорошей» частоте 8.000 МГц = -105 дБн/Гц @ 10 кГц
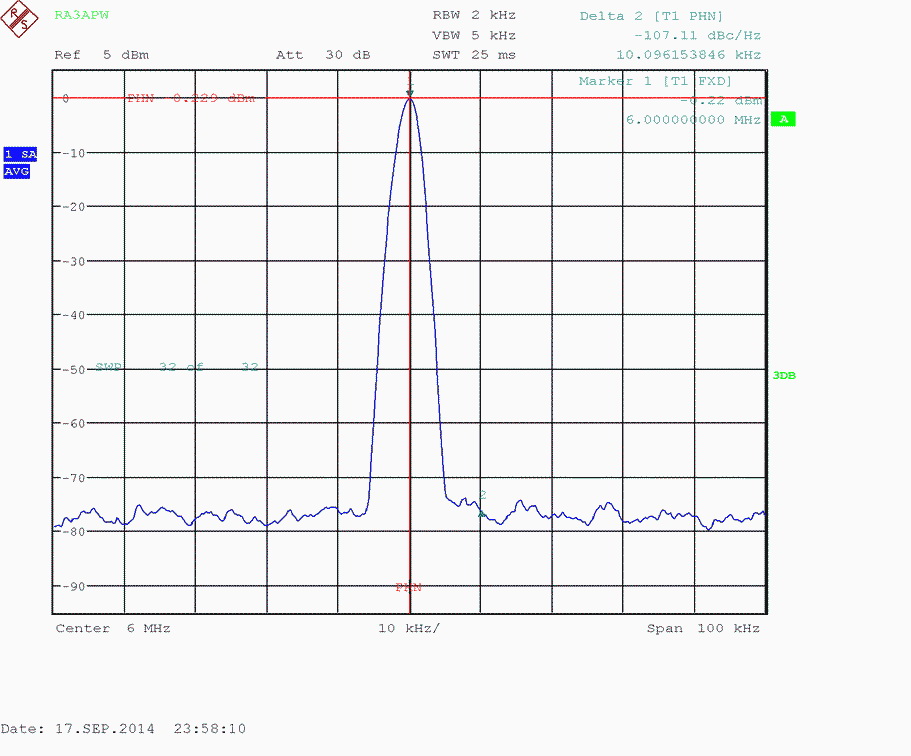
Рис. 16. Фазовый шум на «хорошей» частоте 6.000 МГц = -107дБн/Гц @ 10 кГц
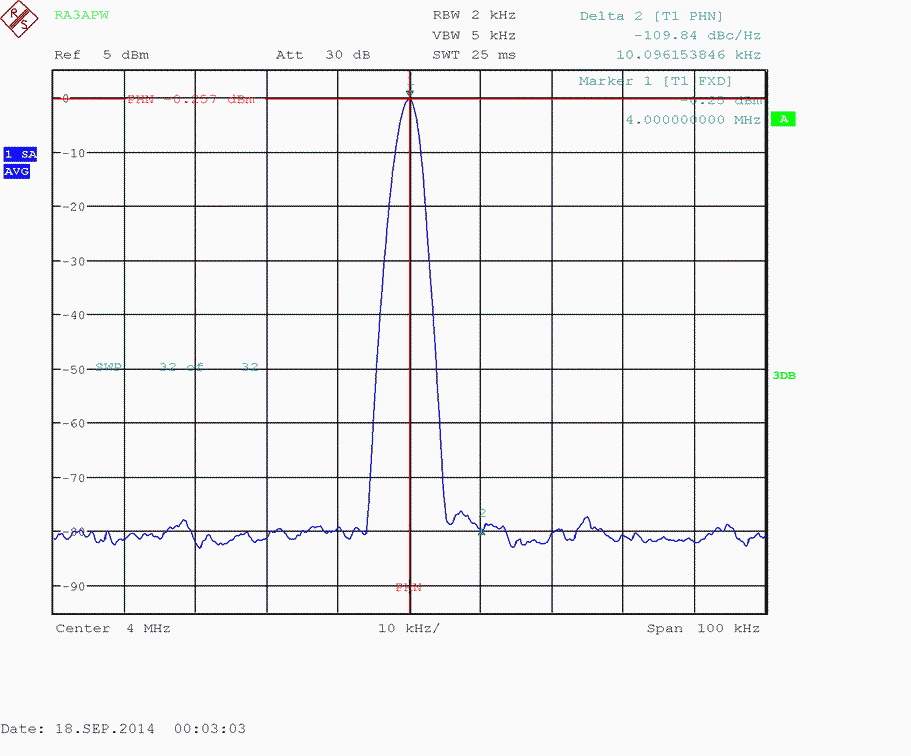
Рис. 17. Фазовый шум на «хорошей» частоте 4.000 МГц = -109 дБн/Гц @ 10 кГц
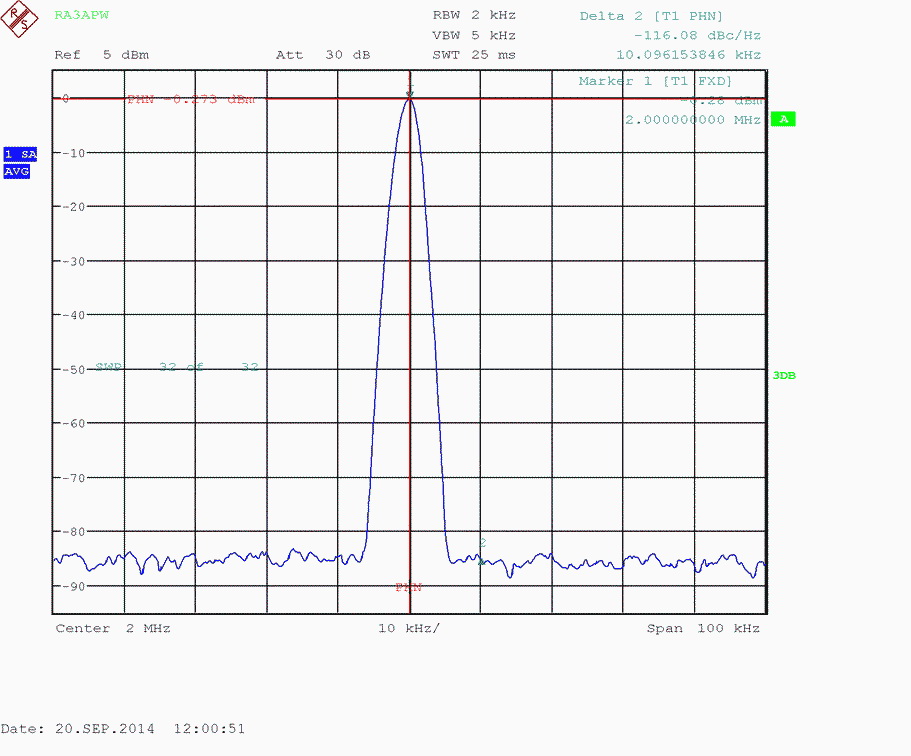
Рис. 18. Фазовый шум на «хорошей» частоте 2.000 МГц = -116 дБн/Гц @ 10 кГц
А теперь смотрим спектр выходного опорного сигнала для «плохих» частот
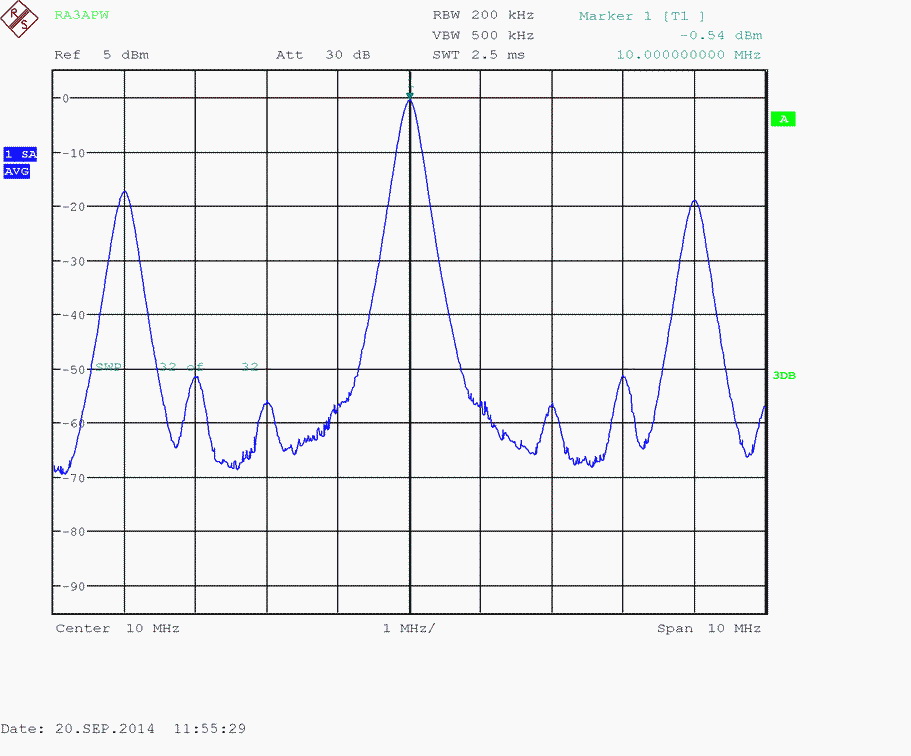
Рис.19. Спектр выходного опорного сигнала на «плохую» частоту 10.000 МГц в полосе обзора 10 МГц
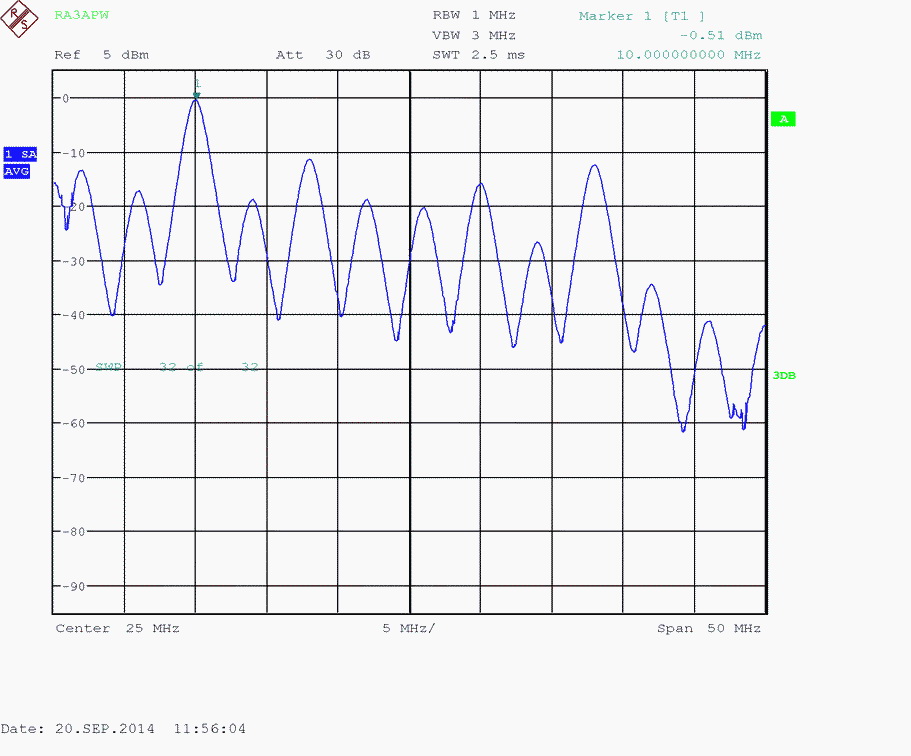
Рис.20. Спектр выходного опорного сигнала на «плохую» частоту 10.000 МГц в полосе обзора 50 МГц
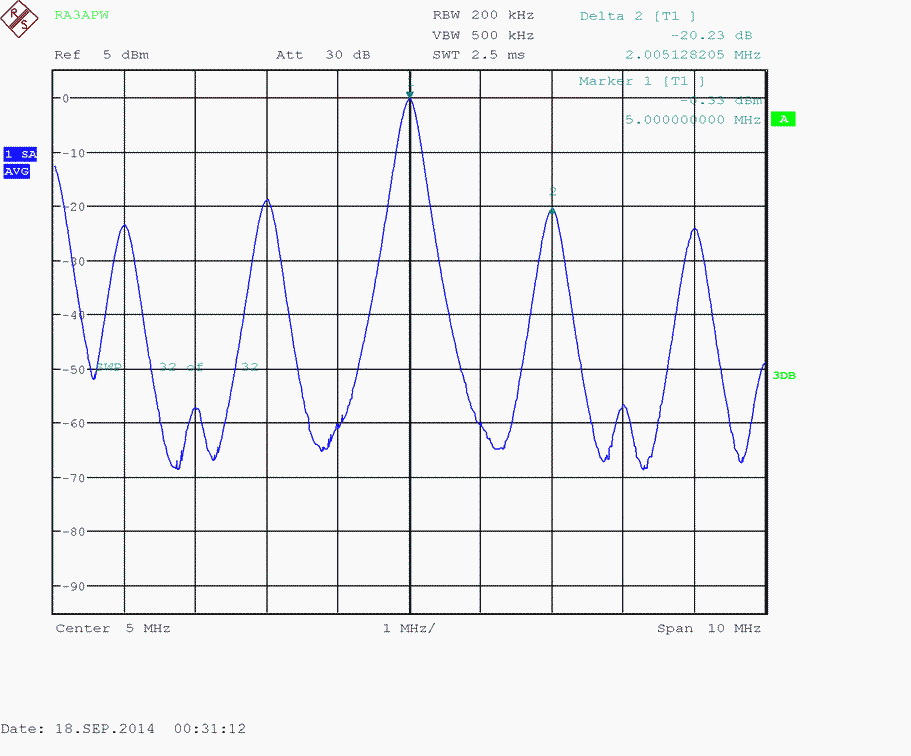
Рис.21. Спектр выходного опорного сигнала на «плохую» частоту 5.000 МГц
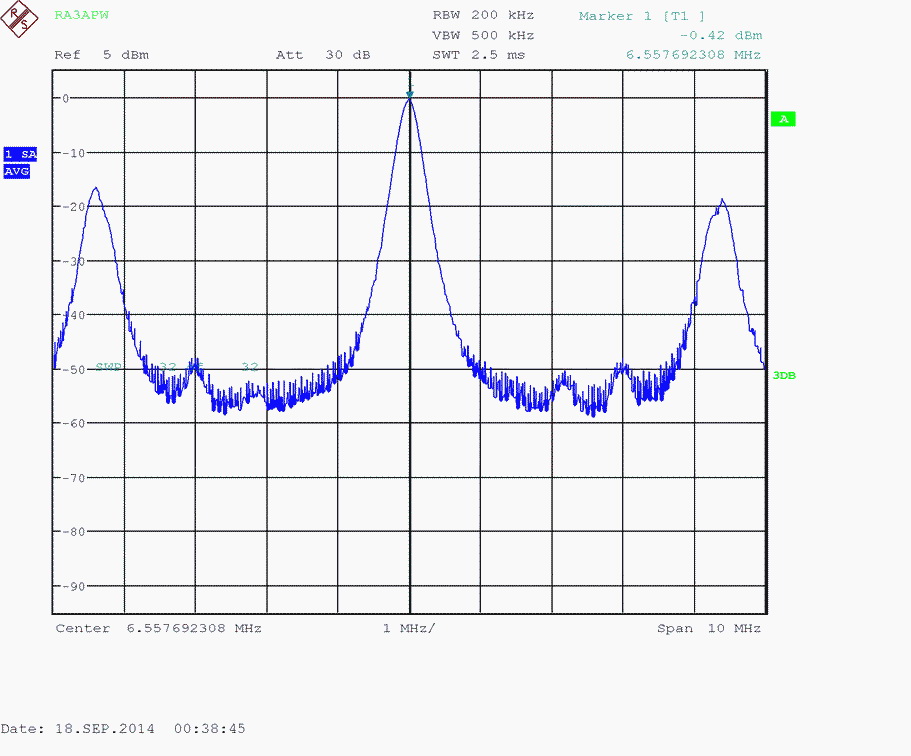
Рис.22. Спектр выходного опорного сигнала на «плохую» частоту 6.550 МГц
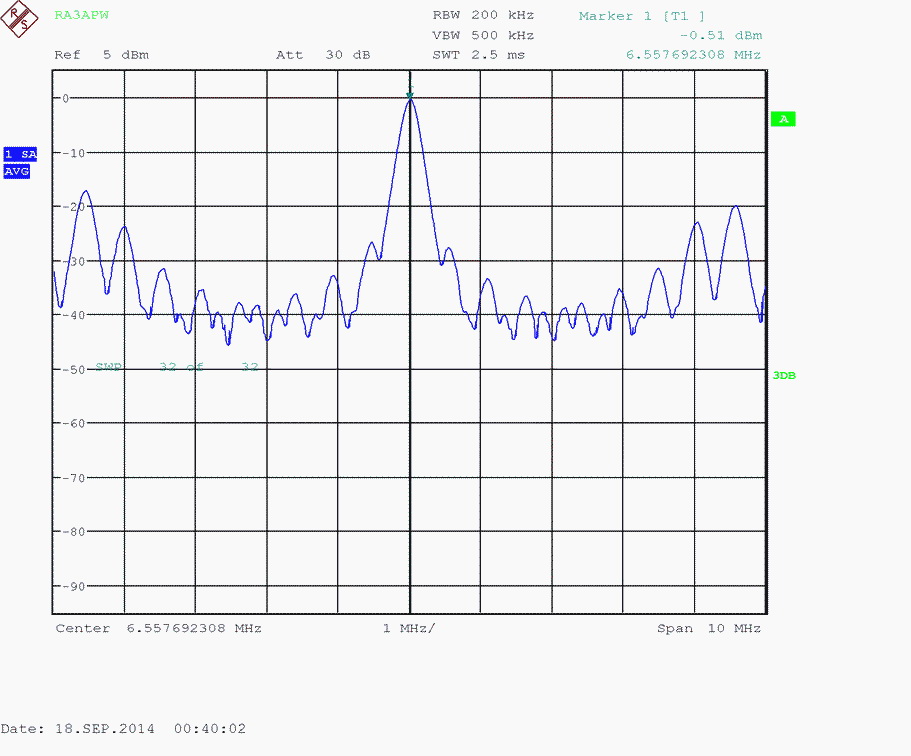
Рис.23. Спектр выходного опорного сигнала на «плохую» частоту 6.570 МГц
Проверяем выходной опорный сигнал осциллографом
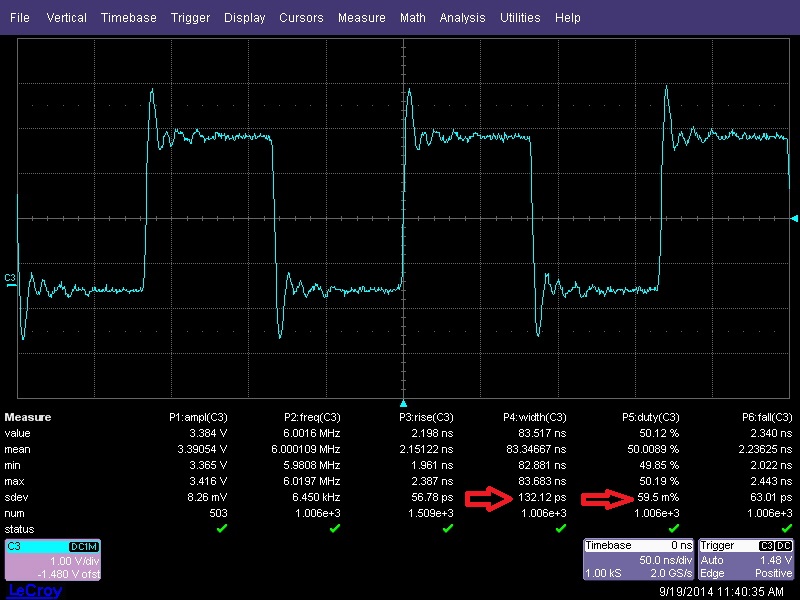 Рис. 24. Выходной опорный сигнал для «хорошей» частоты 6.000 МГц — обратите внимание на малый джиттер (указанный красными стрелками)
Рис. 24. Выходной опорный сигнал для «хорошей» частоты 6.000 МГц — обратите внимание на малый джиттер (указанный красными стрелками)
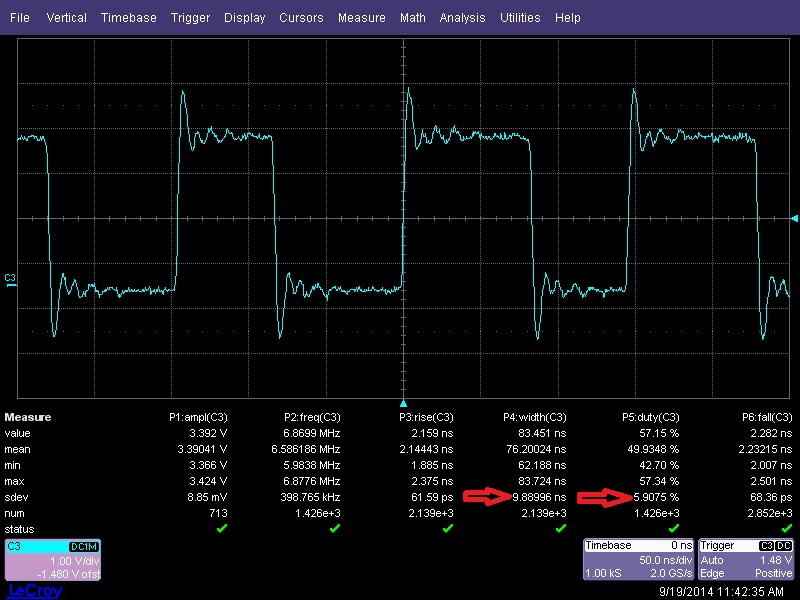 Рис. 25. Выходной опорный сигнал для «плохой» частоты 6.570 МГц — обратите внимание на очень большой джиттер (указанный красными стрелками)
Рис. 25. Выходной опорный сигнал для «плохой» частоты 6.570 МГц — обратите внимание на очень большой джиттер (указанный красными стрелками)
Для определения стабильности частоты измеряем девиацию Аллана
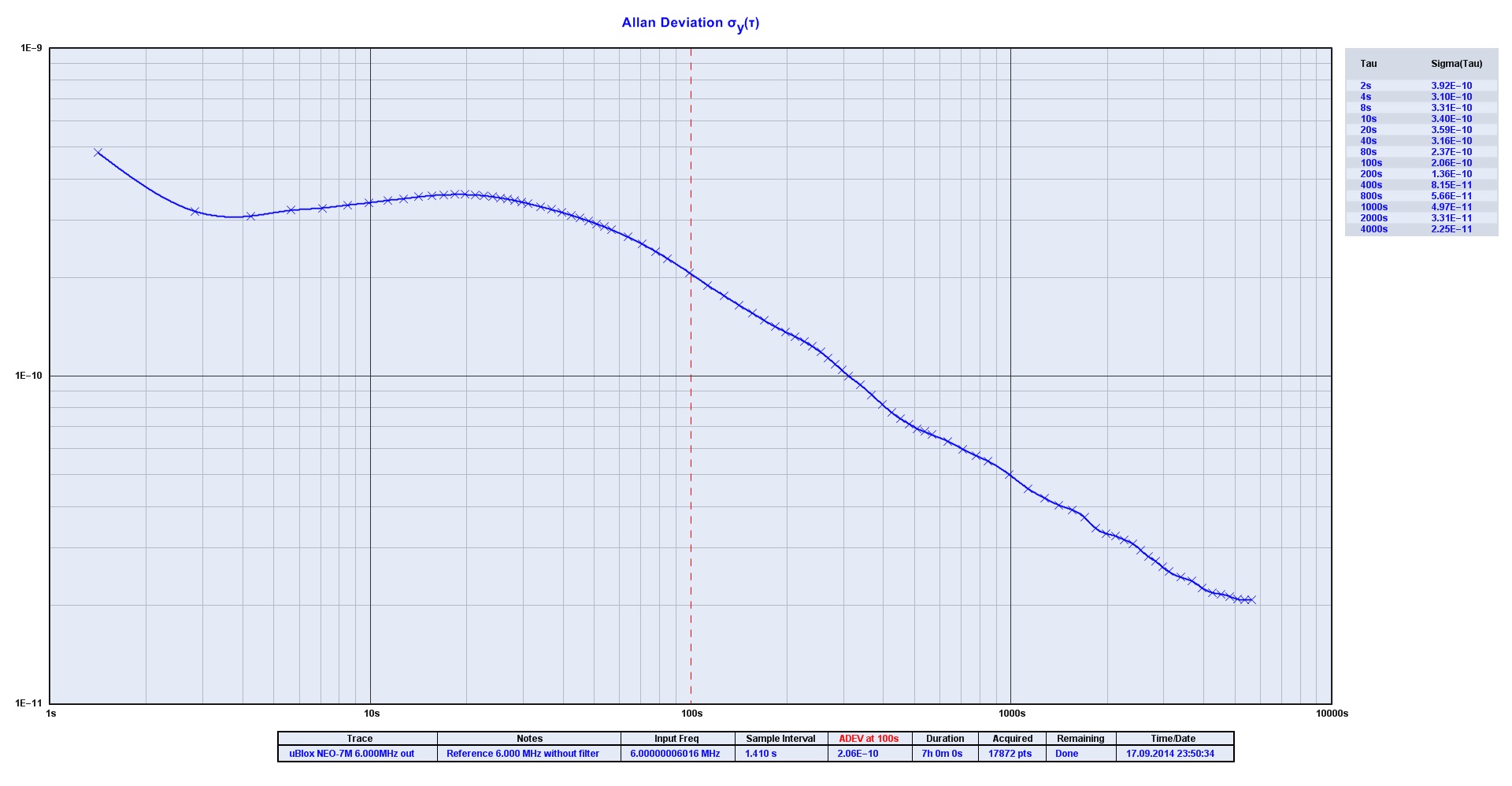
Рис.26. Девиация Аллана для «хорошей» частоты 6.000 МГц — здесь вполне хорошие результаты
В результате проведенных измерений и информации, полученной из документации и конференций, наиболее вероятно, что решение получения опорного сигнала в модуле NEO-7M не является решением GPSDO (GPS Disciplined Oscillator), а представляет собой NCO (Numerically Controlled Oscillator), где вставка или удаление импульсов в фиксированный период времени в опорном сигнале происходит не петлей регулирования, а в результате расчета процессора. В результате этого в спектре выходного сигнала появляется высокий фазовый шум и нежелательные продукты преобразования.
Что понравилось:
- доступность решения — в настоящее время существует несколько типов GPS приемников, имеющих частотный выход опорного сигнала
- не высокая цена
- высокая стабильность опорного сигнала
- возможность использования устройства как частотного калибратора
Что не понравилось:
- высокий (для опорного генератора) уровень фазовых шумов. Даже для «чистой» частоты 4 МГц уровень ФШ составляет только -109 дБн/Гц @ 10 кГц. При этом хорошие опорные генераторы на эти частоты обеспечивают уровень ФШ лучше -140 дБн/Гц. Принимая во внимание, что при умножении опорной частоты в 10 раз фазовый шум увеличивается на 20 дБ, то сложно сказать для каких ответственных применений может использоваться напрямую такое решение.
- «грязный» спектр выходного сигнала для «плохих» частот
- невозможность одновременной поддержки GPS и ГЛОНАСС в NEO-7M в данной версии ПО модуля
И, наконец, традиционный вопрос — что делать
На мой взгляд не все так плохо и можно попытаться получить хороший результат вернувшись к классической схеме GPSDO. Для этого следует добавить внешний OCXO, делитель частоты OCXO, внешний фазовый детектор и пропорционально-интегрирующий фильтр с большой постоянной времени. То есть фактически вернуться опять к решениям, предложенным G3RUH и I2PHD и упомянутых в начале. Однако в нашем случае мы сможем использовать доступный GPS приемник и существенно более высокочастотный опорный сигнал, что крайне важно для получения низких фазовых шумов.
Ссылки: